基本安全規格 ISO12100
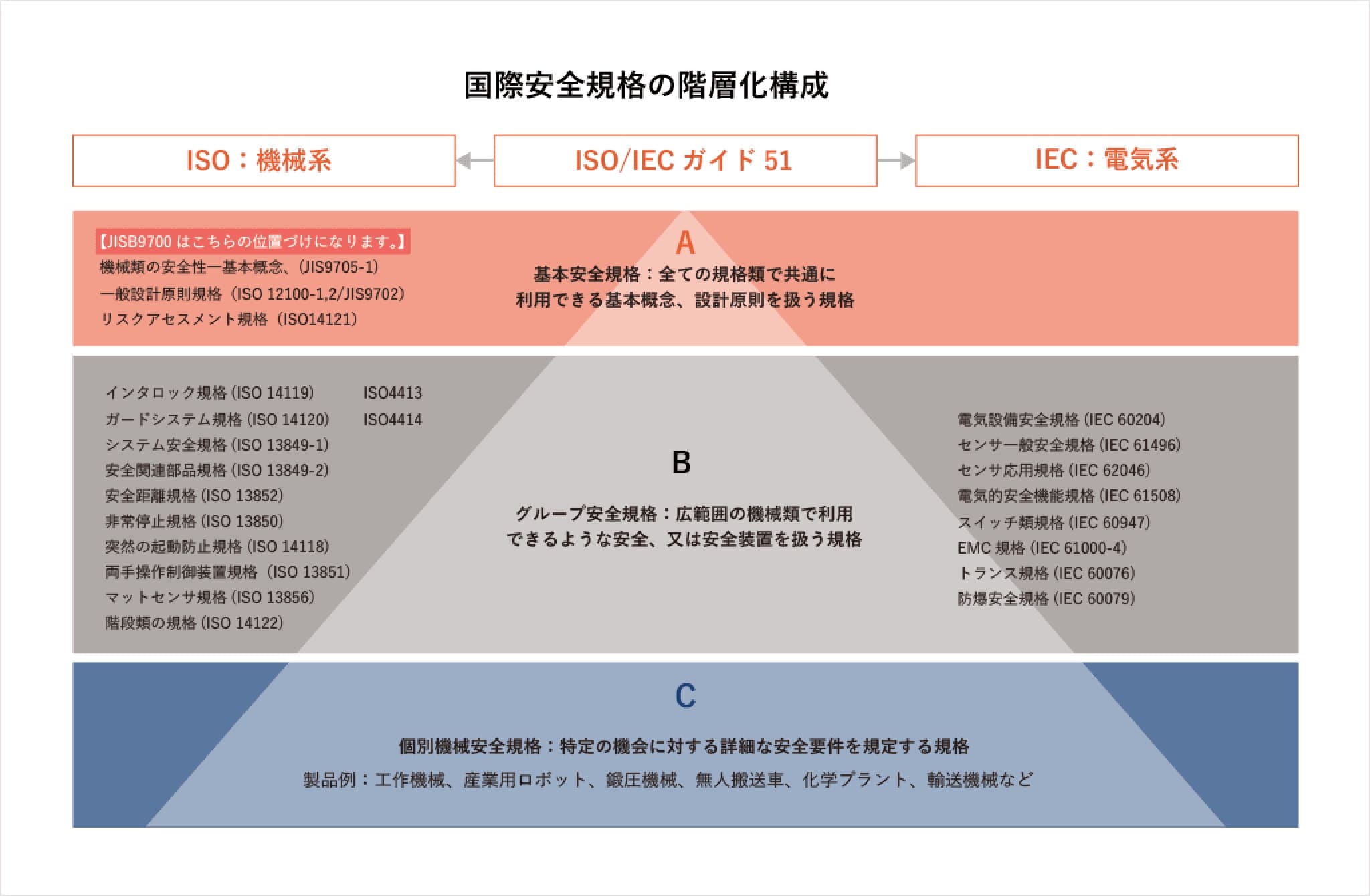
機械の安全に関する国際規格は、A、B、および C 規格の階層構造に従って編成されています。
- 規格(基本安全規格):ISO12100
- B規格(団体安全規格):ISO13849-2、ISO13849-2、ISO4413(油圧)、ISO4414(空圧)など
- C規格:個別機械安全規格
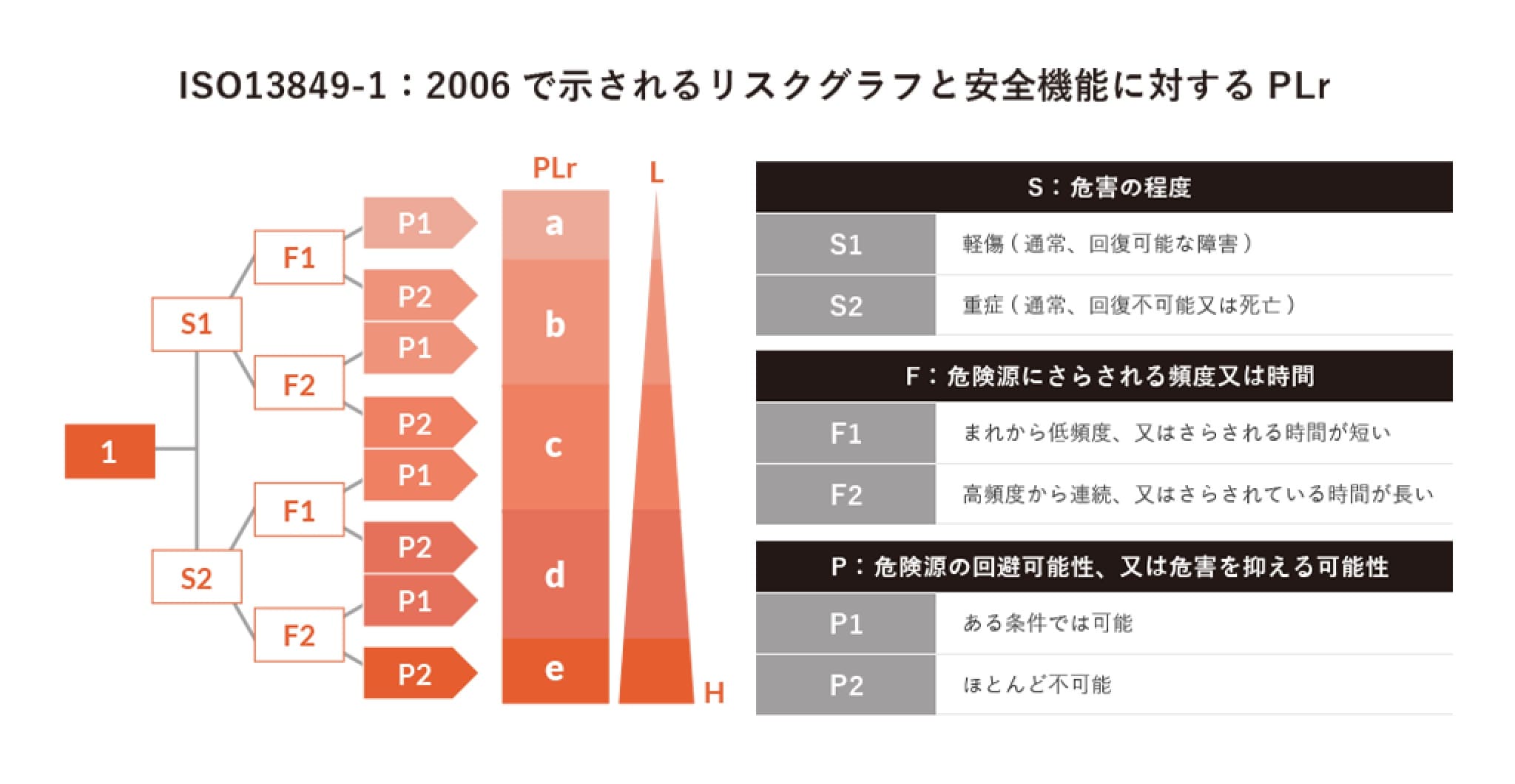
EN954-1/ISO13849-1 安全カテゴリ
カテゴリ ENISO13849-1:2006、JIS B9705-1:2011
| カテゴリー | 要件のまとめ | システムの動作 | 安全を実現するための原則 | 各チャネルの MTTFd | DCavg | CCF |
|---|---|---|---|---|---|---|
B (6.2.3 を参照) |
コンポーネント、SRP/CS、および/または保護装置は、予想される影響に耐えるために、関連する規格に従って設計、製造、選択、および組み立てられるものとします。 基本的な安全原則を使用してください。 | 安全が機能する場合、故障は損失につながる可能性があります。 | 主にコンポーネントの選択によって特徴付けられます。 | 「低」~「中」 | なし | 関係ありません |
1 (6.2.4 を参照) |
B の要件が適用されます。十分に確立されたコンポーネントと十分に実績のある安全原則を使用する必要があります。 | 故障により安全機能が失われる可能性がありますが、発生確率はカテゴリBよりも低くなります。 | 主にコンポーネントの選択によって特徴付けられます。 | 高い | なし | 関係ありません |
2 (6.2.5 を参照) |
B の要件と十分に実績のある安全原則の使用が適用されます。安全機能は、機械制御システムによって適切な間隔でチェックされなければなりません (4.5.4 を参照)。 | チェックの間にエラーが発生すると、安全機能が失われる可能性があります。 安全機能の喪失は、チェックによって検出されます。 | 主に構造によって特徴付けられます。 | 「低い」から「高い」 | 「低」~「中」 | 附属書 F 参照 |
3 (6.2.6 を参照) |
B の要件と、十分に実績のある安全原則を適用されるものとします。 安全関連部品は、これらの部品のいずれかに単一故障が発生しても安全機能の喪失につながらないように、また、合理的に実行可能な場合は常に単一故障を検出できるように設計する必要があります。 |
安全機能は、単一の障害が発生した場合に常に機能します。 すべてではありませんが、一部の障害が検出されます。 検出されない障害が蓄積すると、安全機能が失われる可能性があります。 | 主に構造によって特徴付けられます。 | 「低い」から「高い」 | 「低」~「中」 | 附属書 F 参照 |
4 (6.2.7 を参照) |
B の要件と十分に実績のある安全原則の使用が適用されます。 安全関連部品は、これらの部品のいずれかに単一故障が発生しても安全機能の喪失につながらないように、また、単一故障は安全機能に対する次の要求時に、またはその前に検出されるが、この検出が不可能な場合、検出されない故障の累積が安全機能の喪失につながらないように設計する必要があります。 |
障害が発生した場合に常に機能します。 蓄積された障害の検出により、安全機能が失われる可能性が減少します。 (高DC)。 安全機能の損失を防ぐために、フォルトがタイムリーに検出されます。 | 主に構造によって特徴付けられます。 | 高い | 「高」(障害累積を含む) | 附属書 F 参照 |
ISO13849-1:2015 機械の安全 – 制御システムの安全関連部品

これまで、ISO13849-1:1999 では、制御システムの安全性を安全関連部品自体の「構造」に従って分類することで判断してきました。
ISO1384901:2006では、従来のカテゴリーに加えて、個々の部品の「信頼性」や「品質」などの安全性評価を取り入れ、制御システムの経時変化(実際の運転条件を考慮したもの)も評価することができます。
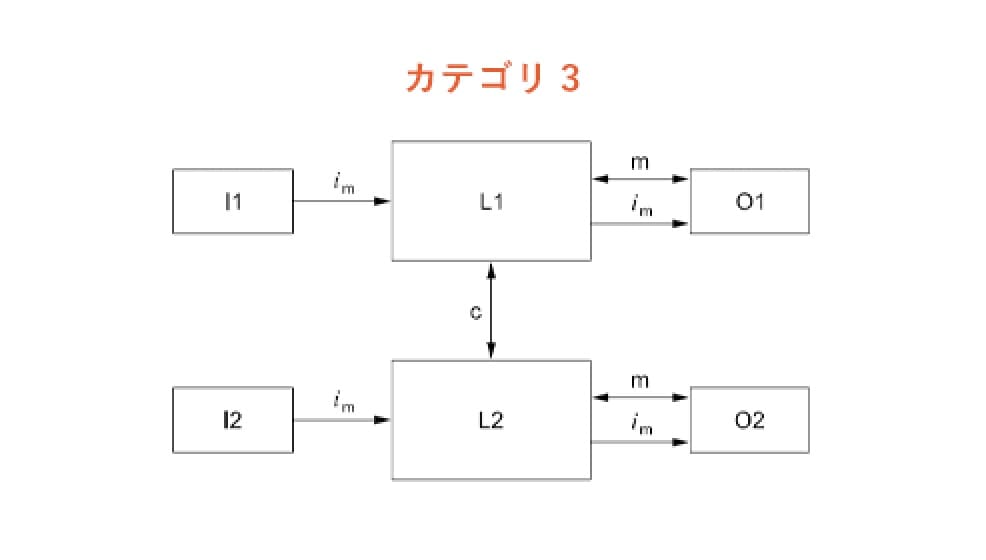
区分ごとの指定「アーキテクチャー」(構造物)
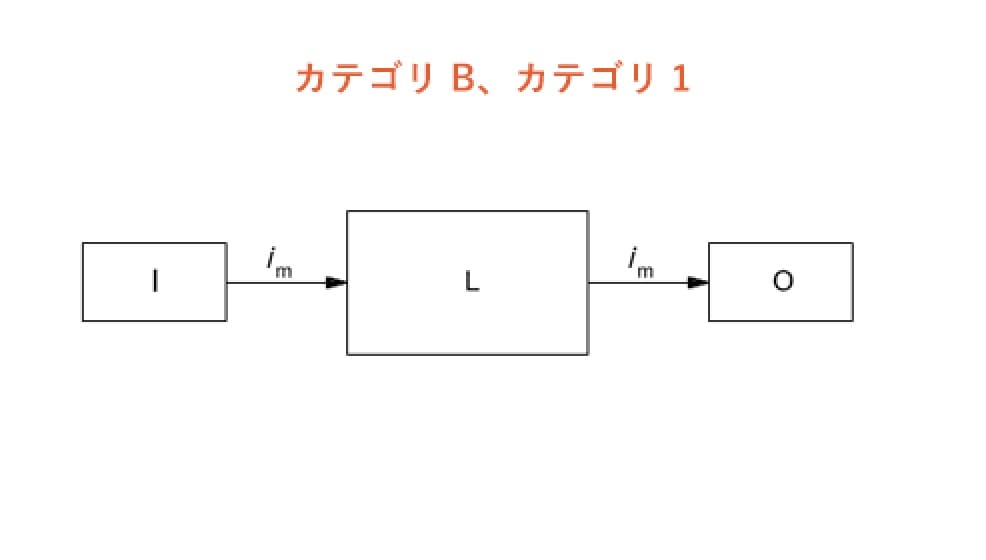
im: 相互接続手段
I: 入力デバイス (センサーなど)
L: 論理
O: 出力機器(電磁弁など)
カテゴリーB: 障害が発生すると、安全機能が失われます。
カテゴリー1: 故障した場合、安全機能は失われますが、発生確率はカテゴリBよりも低くなります。
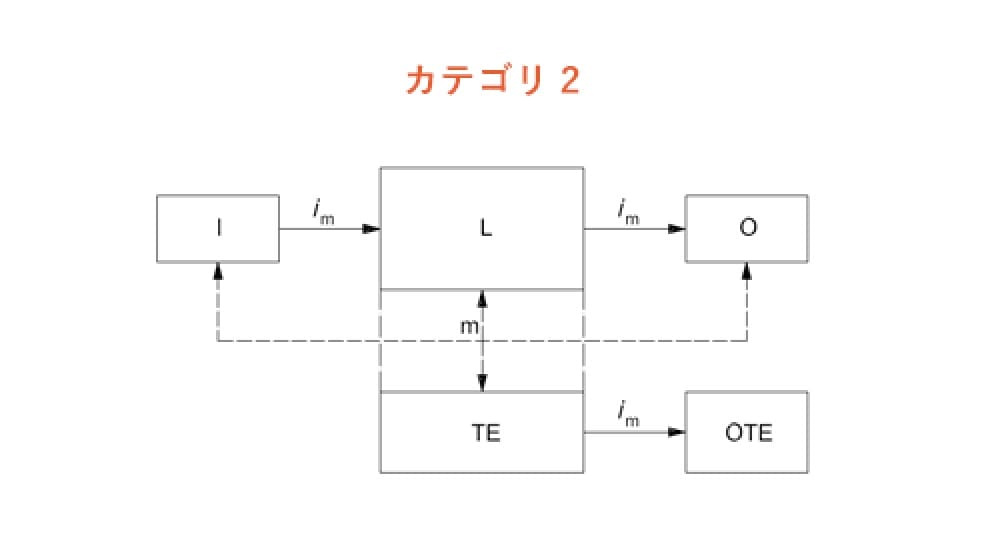
m: モニタリング
TE: 試験装置
OTE: テスト機器の出力
カテゴリー2: 検査(チェック)の合間に不具合が発生すると、安全機能が失われます。 安全機能の喪失を検出する能力。
m: モニタリング
c: 相互監視
カテゴリー3: 2チャンネルの冗長構成とクロスチェック(相互監視)で安全を確保。 そのため、単一の障害が発生した場合でも、安全機能は常に維持されますが、すべての障害が検出されるわけではありません。 検出されない障害が蓄積すると、安全機能が失われます。
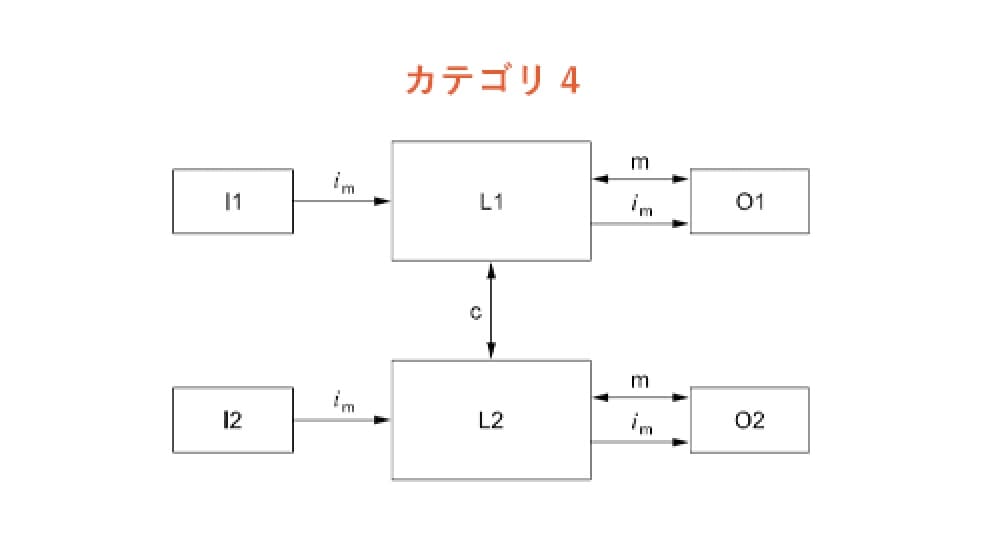
カテゴリー4: 冗長構成とカテゴリー3と同様のクロスチェック(相互監視)により安全性を確保しつつ、1回の故障でも常に安全機能を維持します。 安全機能が失われないように、安全機能が作動する前に障害が検出されます。
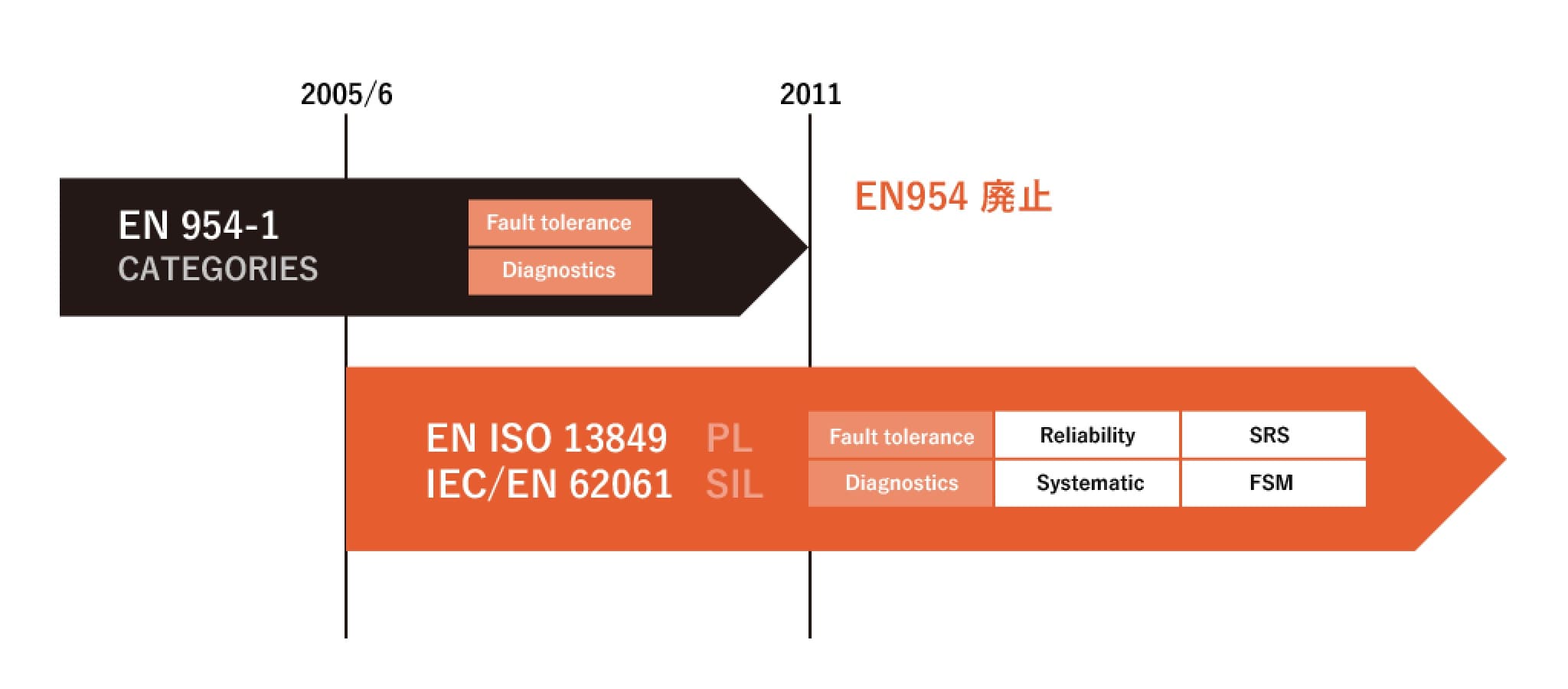
EN954-1 の撤回により、カテゴリは PL の一部です
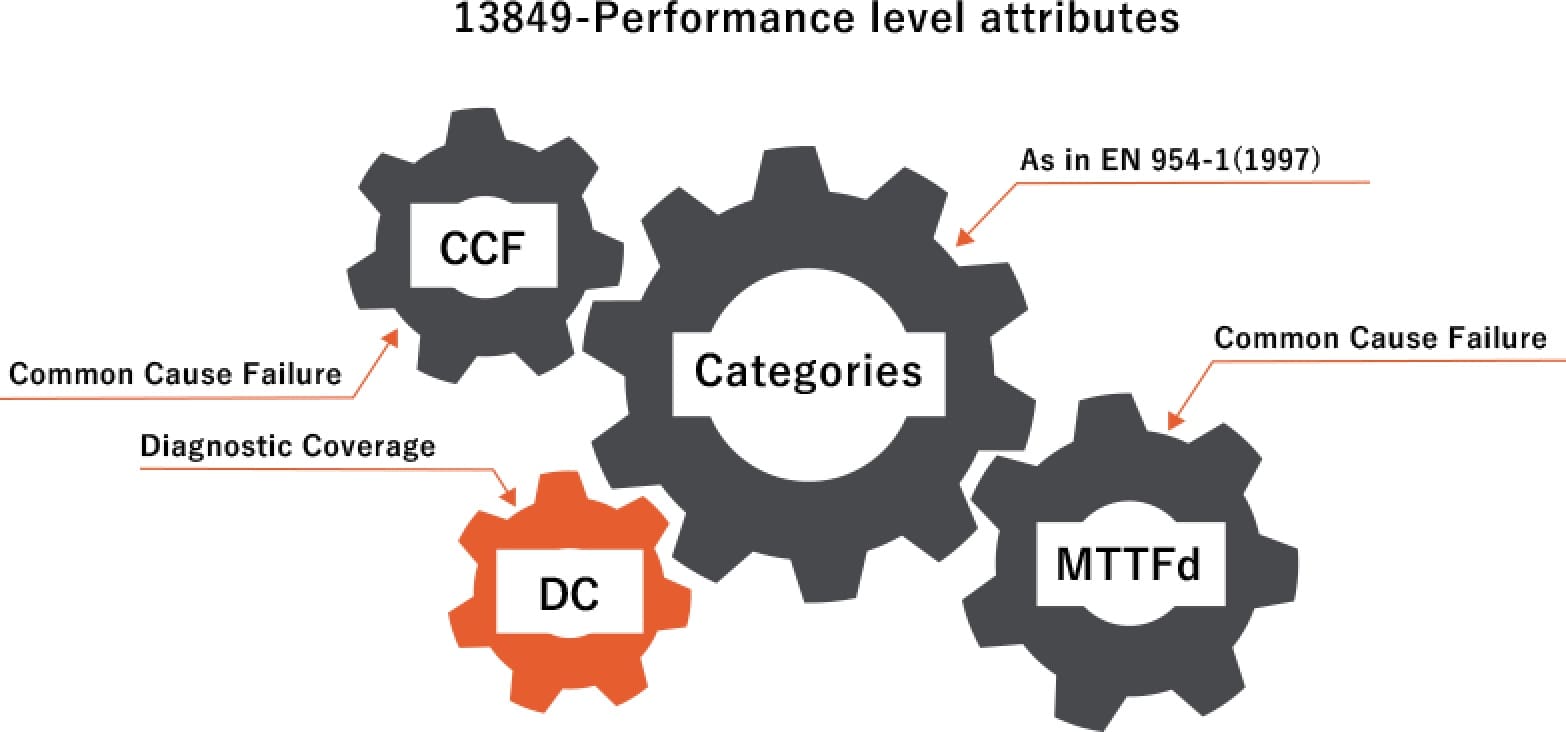
パフォーマンスレベル(PL)を決定する4つの項目
以下の(1)~(4)で算出した値の合計がPL(Performance Level)となります。 安全に関わるすべての部品(入力装置、ロジック、出力装置<電磁弁>)の性能レベルが、リスクアセスメントで定められた「要求性能レベル(PLr)」を満足する必要があります。
- カテゴリー:
制御系の安全関連部分の構造。 システムの構造は、Bから4までの各カテゴリの要件を満たすことで決定できますが、カテゴリだけではシステムの経時変化を評価できないため、ISO 138459-1:2006で新しい規格が規定されています。 また、I(入力デバイス)、L(ロジック)、O(出力デバイス)の各要素による各カテゴリの具体的な構造を示します。 - MTTFd (危険な故障までの平均時間):
制御システムの安全関連部分が危険な障害に達するまでにかかる平均時間。 高、中、低で評価されます。 - DCavg (診断範囲):
自己診断率の平均値のことで、制御系の安全関連部品の「全危険故障率」を分母、「検出危険故障率」を分子として算出されます。 DCavg は、なし、低、中、高の 4 つのカテゴリで評価されます。 - CCF (共通原因故障):
制御系の複数チャネル全てが共通の原因で故障した場合を想定し、故障リスクを低減するためのチェック項目です。 カテゴリー2以上は65点以上が必要.
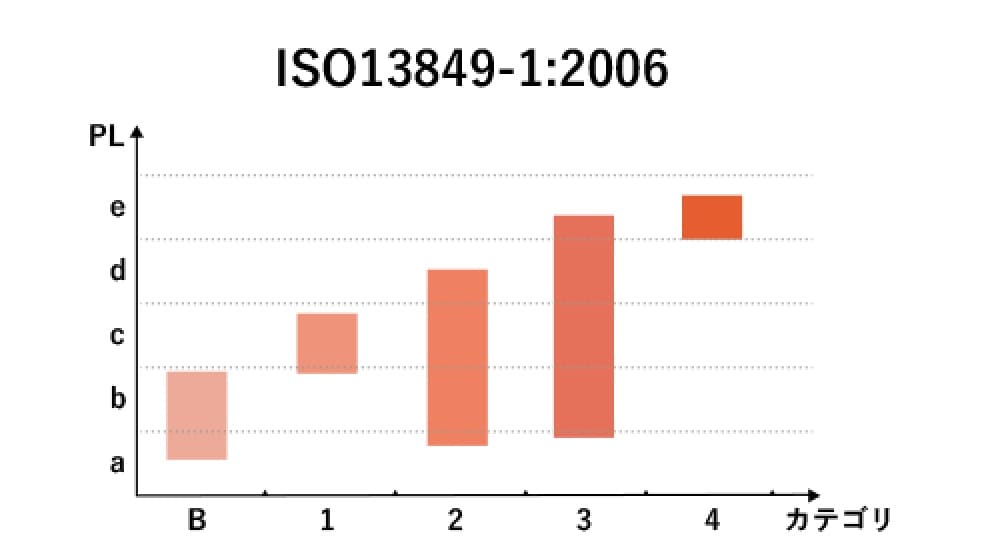
ISO13849-1:2006 パフォーマンス レベル
ISO13849-1:2006では、制御システムの安全関連部品(入力、ロジック、出力<電磁弁>)に対して、新たに「性能レベル(PL)」が規定され、性能が要求されます。
性能レベルは安全関連部品の性能区分として算出されますが、安全関連部品が要求する「要求性能レベル(PLr)」を満たす必要があります。
PLrより低い場合は、(1)Category:システム構成要件、(2)MTTFd:選択した機器の信頼性、(3)DCavg:自己故障率、(4)CCF:共通故障原因。 各項目を見直し、PLrを満たす必要があります。
| パフォーマンスレベル (PL) | 単位時間当たりの危険故障確率 (PFHd) 1/h |
|---|---|
| a | 10-5以上10-4未満 <0.001%~0.01%> |
| b | 3×10-6以上10-5未満 <0.0003%~0.001%> |
| c | 10-6以上3×10-6未満 <0.0001%~0.0003%> |
| d | 10-7以上10-6未満 <0.00001% ~ 0.0001%) |
| e | 10-8以上10-7未満 <0.000001%~0.00001%> |
チームへのお問い合わせ
ROSSは、フルードパワーに関する豊富な経験を持つ専門家からなる強力なチームを擁しており、お客様の安全目標に対するソリューションを見つけるお手伝いをすることができます。カスタムソリューション、現行製品、アプリケーション、安全講習など、ROSSはお客様のビジネス仕様を念頭に置きながら、必要なものを提供いたします。